|
Outline
This procedure covers the robotic tinning of chip components.
|
|||||||||||||||||||||||||||||||||||||||
|
Procedure
Evaluation
|
|||||||||||||||||||||||||||||||||||||||
Images and Figures
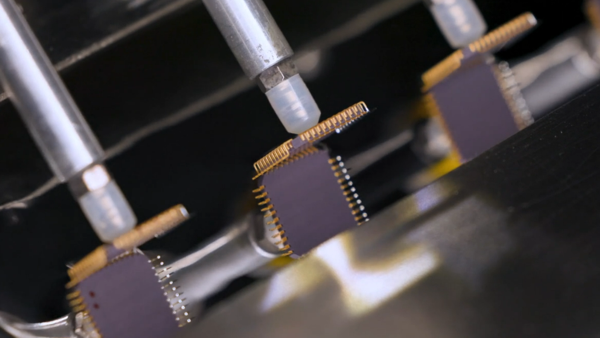
Tinning, Chip/Discrete Components, Robotic Method
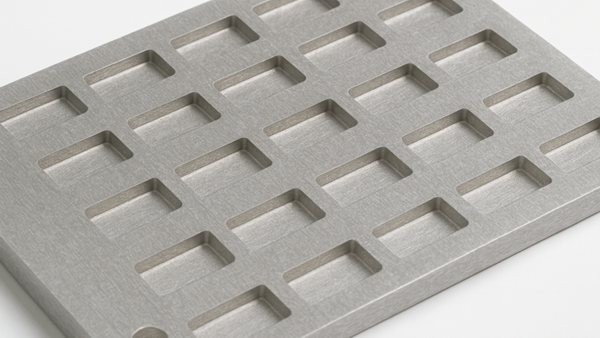
Figure 1. Use a matrix tray or fixture tray to position the components for pickup.

Figure 2. Set up the robotic tinning system with the proper process parameters.
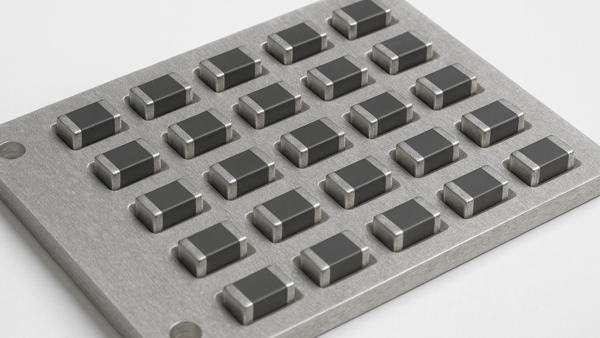
Figure 3. Place the components into the tray and position the tray in the system's staging area.

Figure 4. The system will use a vacuum-pickup or mechanical grippers to retrieve one or more components from the tray.
|
|||||||||||||||||||||||||||||||||||||||
11.2 Component Termination Conditioning and Tinning, Chip/Discrete Components
This procedure covers robotic tinning of chip and discrete components.
Minimum Skill Level: Expert
Conformance Level: High
REQUEST FOR QUOTE GUIDES INDEX









